胡 正涛 HU ZHENGTAO
Robotics researcher, flute player
Graduate School of Engineering Science, Osaka University
E-mail: hu[at]hlab.sys.es.osaka-u.ac.jp
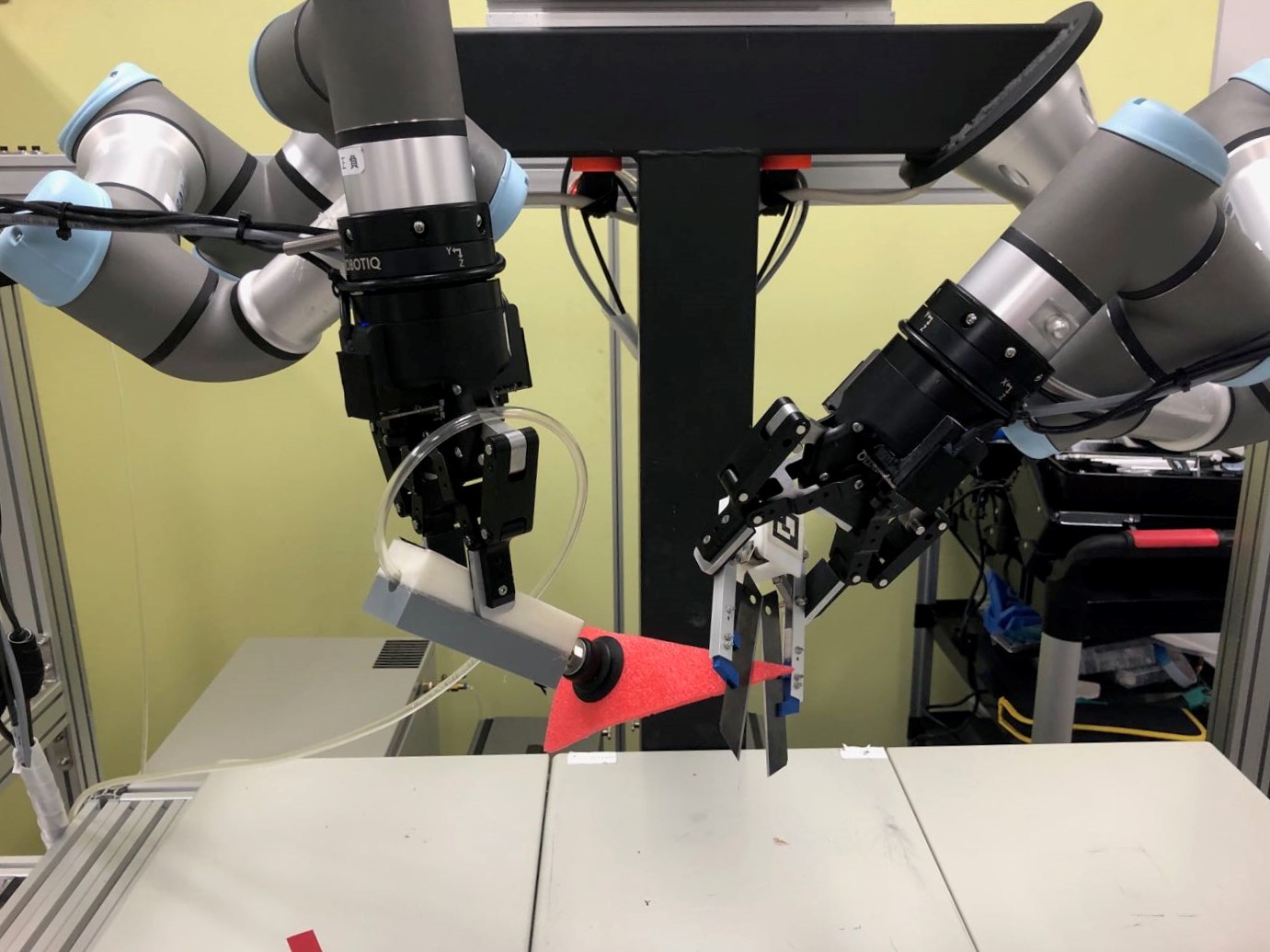
Robot manipulation with mechanical tools
Journal Paper
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama, and Kensuke Harada, “A Mechanical Screwing Tool for 2-Finger Parallel Grippers – Design, Optimization, and Manipulation Policies,” IEEE Transactions on Robotics (TRO), 2021.
- Zhengtao Hu, Weiwei Wan, and Kensuke Harada, “Designing a Mechanical Tool for Robots with 2-Finger Parallel Grippers,” Robotics and Automation Letters (RAL), with IROS option, 2019. Video 1. Video 2. (Reported by IEEE Spectrum Video Friday, IEEE Robotics and Automation Society Japan Joint Chapter Young Award (2019))
Conference
- Zhengtao Hu, Weiwei Wan, and Kensuke Harada, “Designing a Mechanical Tool for Robots with 2-Finger Parallel Grippers,” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019.
- Zhengtao Hu, Weiwei Wan, and Kensuke Harada, “Picking Task by a Robot Using Mechanical Tools,” ROBOMECH, 2019.
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama,and Kensuke Harada, “A Mechanical Rotating Tool for 2-Finger Parallel Grippers,” ROBOMECH, 2020.
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama,and Kensuke Harada, “Manipulation Polices for Screw Fastening Task Using the Designed Rotating Tool,” ROBOMECH, 2020.
Regrasp planning for uncertainty elimination
Journal Paper
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama, and Kensuke Harada. “Reducing Uncertainty Using Placement and Regrasp Planning on a Triangular Corner Fixture”. TechRxiv: https://doi.org/10.36227/techrxiv.16685332.v1, 2021.
Conference Paper
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama and Kensuke Harada. Regrasp Using a Tray Corner for Eliminating Grasp Uncertainty. The Conference of the Robotics Society of Japan(RSJ)
- Zhengtao Hu, Weiwei Wan, Keisuke Koyama and Kensuke Harada. Eliminating Grasp Uncertainty Using Planned Sequential Handover Regrasp with Compliance control. The conference of the Society of Instrument and Control Engineers System Integration Division (SICE SI)
Robotic assembly challenge (World Robot Summit)
I'm a menber of Team O2AC
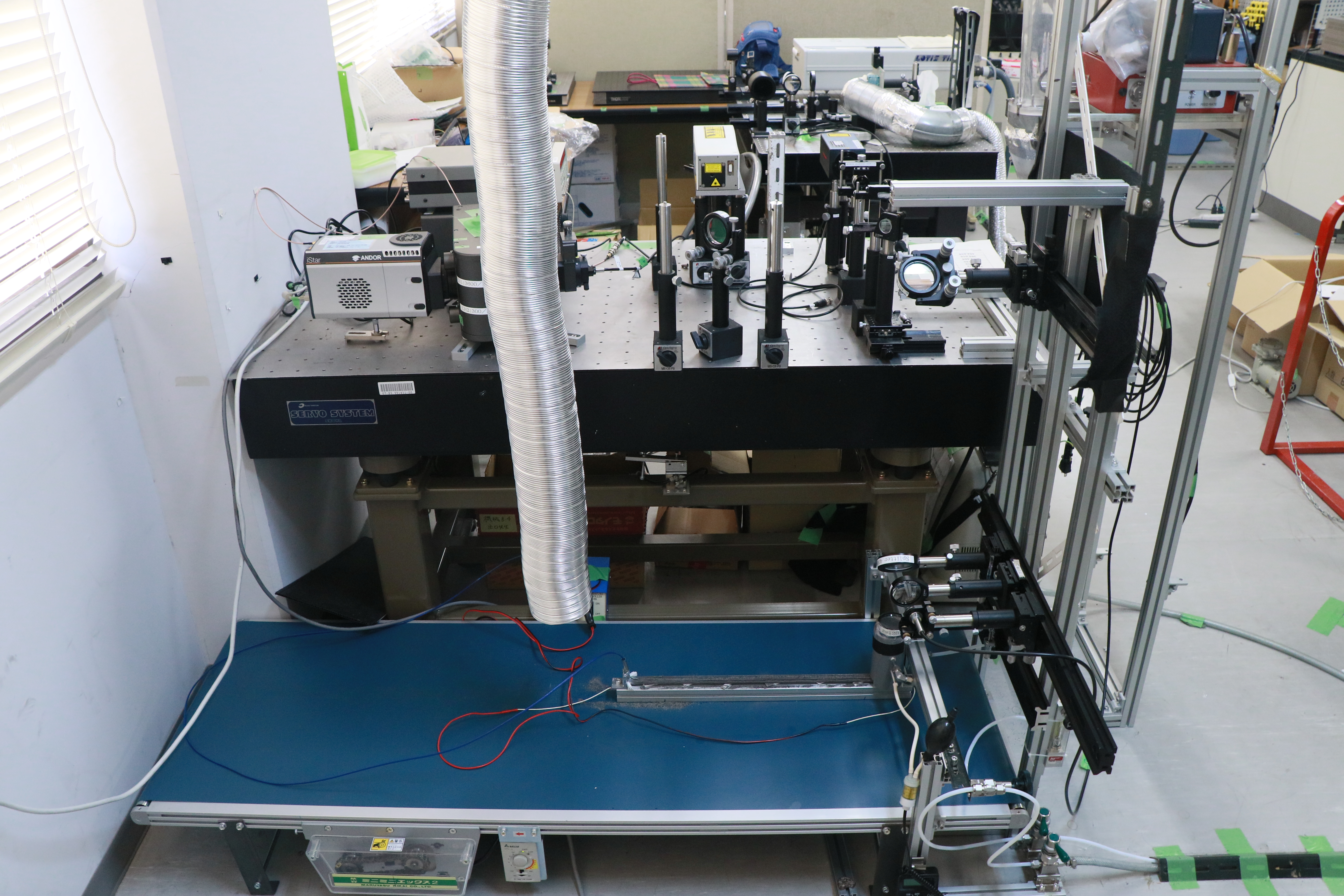
Automatic powder component analysis system using LIBS
Conference
- Zhengtao Hu, Heng Xu, Yuki Fujita, Yoshihiro Deguchi. Researches on Carbon Content Quantitative Detection of Rice Husk Ash and the Characters of Nonflammable Particle. 4th International Forum on Advanced Technologies, 2018, Japan. Award.
- Zhengtao Hu, Yoshihiro Deguchi, Heng Xu, Qulan Zhou. Quantitative Detection of Unburned Carbon in Rice Hush Ash Using LIBS considering the influence of laser pulse width. 2nd Asian Symposium on Laser Induced Breakdown Spectroscopy, 2017, Japan. Award.
- Zhengtao Hu, Yoshihiro Deguchi, Qulan Zhou, Renwei Liu, Heng Xu. The Temperature Influence on Unburned Carbon Detection of Rice Husk Ash by LIBS. Third International Forum on Advanced Technologies, 2017, Taiwan, China.
- Zhengtao Hu, Yoshihiro Deguchi. Measurement of Unburned Carbon in Rice Husk Ash Using Laser-Induced Breakdown Spectroscopy Considering the Powder Motion Condition. 53th Summer Symposium of the Society of Powder Technology, 2017, Japan